
Real-Time Building Component Inventory (EBI)
A portable hardware-software system for intelligent real-time detection, counting, and localisation of building elements in existing structures. Operating entirely on-device - without cloud infrastructure or BIM dependencies - the system uses edge-AI and sensor fusion (cameras, GNSS, IMU) to identify and measure elements such as doors, columns, walls, and outlets, with augmented reality visualisation of results.
The project prioritises privacy-preserving operation and field portability, enabling rapid structural surveys in contexts where connectivity or data transfer is restricted. Funded by Zukunft Bau (BBSR), Federal Institute for Research on Building, Urban Affairs and Spatial Development.
View Project →Partners
BTU Cottbus, Chair of Digital Design Methods - Funded by ZukunftBau

Multi-Robot Collaboration for Large-Scale CFRP Construction
This project developed and demonstrated a physically distributed multi-robot fabrication system for the construction of long-span fibre composite structures. A coordinated workcell comprising two high-payload six-axis industrial robots and a custom-built UAV performed collaborative fibre filament winding - with each machine playing a distinct, sensor-integrated role in a continuous, interdependent fabrication process.
The central challenge was orchestrating a heterogeneous system of robots, drones, and sensor-integrated machines across a physically distributed environment. Key contributions include a platform-agnostic ROS-based communication infrastructure, a custom task execution interface compiled directly from the design environment, adaptive industrial robot control strategies, and hardware mechanisms for managing process tolerances arising from distributed collaboration. The result - the ICD/ITKE Research Pavilion 2016–17 - is a 12-metre cantilever structure fabricated entirely through coordinated robotic means.
View Project →Partners
Institute for Computational Design and Construction, Universität Stuttgart; ITKE, Universität Stuttgart - Funded by Volkswagen Foundation, DFG
Publications
- Multi-Machine Fabrication: An Integrative Design Process Utilising an Autonomous UAV and Industrial Robots for the Fabrication of Long-Span Composite Structures
- Physically Distributed Multi-Robot Coordination and Collaboration in Construction
- ICD/ITKE Research Pavilion 2016–2017: Integrative Design of a Composite Lattice Cantilever

Autonomous Robotic Construction Through Deep Reinforcement Learning
This peer-reviewed paper presents a distributed control and communication infrastructure for autonomous robotic additive manufacturing in construction, combining deep reinforcement learning (DRL) with computational design and robotic fabrication environments. The system achieves a high degree of construction autonomy through model-free agents trained within real-time physics simulations embedded in CAD software.
Key contributions include highly efficient geometry compression via convolutional autoencoders and signed distance fields, industry-grade hardware control, and action complementation through geometric scripting. The full codebase is published open source. Published in Construction Robotics, Vol. 6, 2022.
Read Paper →Partners
Institute for Computational Design and Construction, Universität Stuttgart; University of Technology Sydney; Centre for Autonomous Systems, UTS - Funded by German Academic Exchange Service (DAAD)
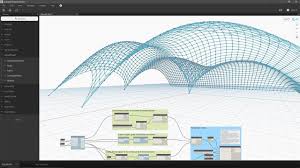
DynaShape - Projective Dynamics Modelling in Autodesk Dynamo
DynaShape brings real-time constraint-based form-finding and physics simulation directly into Autodesk Dynamo, enabling architects and engineers to design and explore complex structural and architectural forms interactively. Built on the Projective Dynamics algorithm, it supports a wide range of geometric constraints - from simple distance and co-planarity conditions to full structural equilibrium solvers - all updating live as parameters change.
Presented at Autodesk University 2018, DynaShape bridges the gap between parametric modelling and physics-based design exploration, making advanced structural form-finding accessible within standard BIM and design workflows.
View at Autodesk University →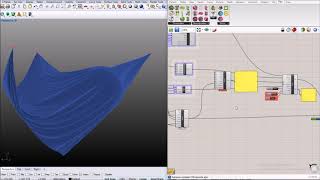
FlexHopper - Real-Time Particle-Based Physics in Grasshopper
FlexHopper is a GPU-accelerated particle physics plugin for Grasshopper, bringing real-time simulation of rigid bodies, soft bodies, fluids, and cloth directly into the parametric design environment. Powered by NVIDIA FleX, it enables designers and researchers to explore physically plausible form-finding, material behaviour, and dynamic systems without leaving their modelling workflow.
The plugin has been widely adopted in computational design research and education as a tool for exploring emergent structural and material behaviour at early design stages, bridging simulation fidelity with design iteration speed.
Watch Demo →Publications
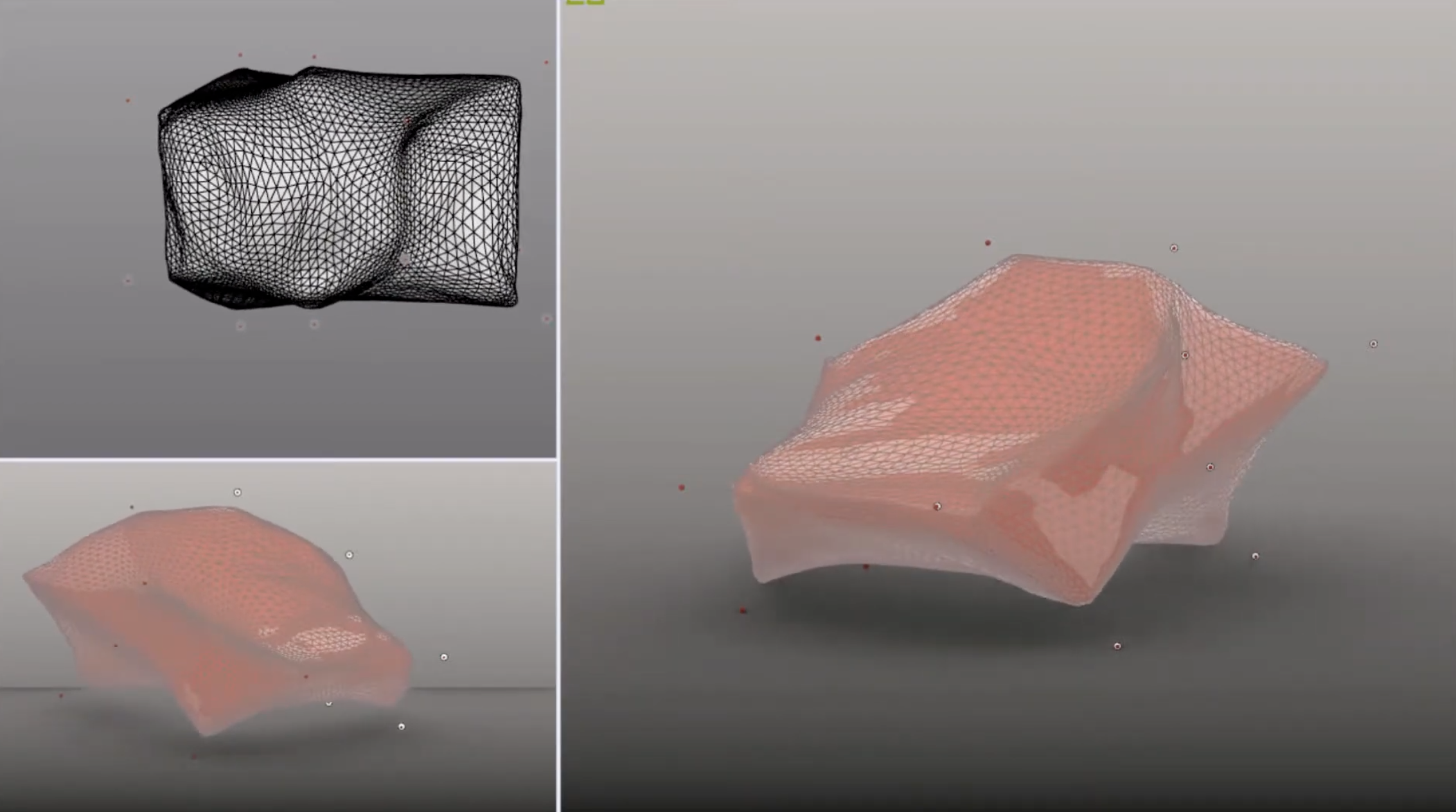
CrowAI - Self-Organising Neural Networks for Mesh Modelling
Crow aims to combine self-organising neural networks of any (irregular) custom topology with the constraint-based paradigm of projective dynamics. The video shows a series of real-time experiments demonstrating the approach in action.
Computation is highly parallelised using CUDA C/C++ and ported to a Windows CAD environment through C++/CLI.
Watch Demo →